Description
- Class:
- Alias:
cube_build
The cube_build step takes MIRI or NIRSpec IFU calibrated 2-D images and produces
3-D spectral cubes. The 2-D disjointed IFU slice spectra are corrected
for distortion and assembled into a rectangular cube with three orthogonal axes: two
spatial and one spectral.
The cube_build step can accept several different forms of input data, including:
A single file containing a 2-D IFU image
A data model (
IFUImageModel) containing a 2-D IFU imageAn association table (in JSON format) containing a list of input files
A
ModelContainerwith several 2-D IFU data models
There are a number of arguments the user can provide either in a parameter file or on the command line that control the sampling size of the cube, as well as the type of data that is combined to create the cube. See the Step Arguments section for more details.
Assumptions
It is assumed that the assign_wcs step has been applied to the data, attaching the distortion and pointing
information to the image(s). It is also assumed that the photom step has been applied to convert the pixel
values from units of count rate to surface brightness. This step will only work with MIRI or NIRSpec IFU data.
The cube_build algorithm is a flux conserving method, requires the input data to be in units of surface brightness
(MJy/sr), and produces 3-D cubes also in units of surface brightness. 1-D spectral extraction from these cubes may then
produce spectra either in surface brightness units of MJy/sr or in flux units of Jy.
The NIRSpec calibration plan for point source data is designed to produce units of flux density from the calwebb_spec2 pipeline.
For NIRSpec IFU point source data, the calwebb_spec2 pipeline divides the flux values by a pixel area map to produce pseudo
surface brightness units (MJy/sr). This allows the cube_build program to conserve flux when it combines and resamples
the data. True fluxes are produced only at the extract_1d_step, in which a 1D spectrum is extracted from the cube using an
appropriate extraction aperture, with resulting units of Jy.
Instrument Information
The JWST Integral Field Unit (IFU) spectrographs obtain simultaneous spectral and spatial data on a relatively compact region of the sky.
The MIRI Medium Resolution Spectrometer (MRS) consists of four IFUs providing simultaneous and overlapping fields of view ranging from ~3.3” x 3.7” to ~7.2” x 7.7” and covering a wavelength range of 5-28 microns. The optics system for the four IFUs is split into two paths. One path is dedicated to the two short wavelength IFUs and the other one handles the two longer wavelength IFUs. There is one 1024 x 1024 detector for each path. Light entering the MRS is spectrally separated into four channels by dichroic mirrors. Each of these channels has its own IFU that divides the image into several slices. Each slice is then dispersed using a grating spectrograph and imaged on one half of a detector. While four channels are observed simultaneously, each exposure only records the spectral coverage of approximately one third of the full wavelength range of each channel. The full 5-28 micron spectrum is obtained by making three exposures using three different gratings and three different dichroic sets. We refer to a sub-channel as one of the three possible configurations (A/B/C) of the channel where each sub-channel covers ~1/3 of the full wavelength range for the channel. Each of the four channels has a different sampling of the field, so the FOV, slice width, number of slices, and plate scales are different for each channel.
The NIRSpec IFU has a 3 x 3 arcsecond field of view that is sliced into 30 0.1-arcsecond regions. Each slice is dispersed by a prism or one of six diffraction gratings. The NIRSpec IFU gratings provide high-resolution and medium resolution spectroscopy while the prism yields lower-resolution spectroscopy. The NIRSpec detector focal plane consists of two HgCdTe sensor chip assemblies (SCAs). Each SCA is a 2-D array of 2048 x 2048 pixels. For low or medium resolution IFU data the 30 slices are imaged on a single NIRSpec SCA. In high resolution mode the 30 slices are imaged on the two NIRSpec SCAs.
Terminology
General IFU Terminology
pixelA pixel is a physical 2-D element of the detector focal plane arrays.
spaxelA spaxel is a 2-D spatial element of an IFU rectified data cube. Each spaxel in a data cube has an associated spectrum composed of many voxels.
voxelA voxel is 3-D volume element within an IFU rectified data cube. Each voxel has two spatial dimensions and one spectral dimension.
MIRI Spectral Range Divisions
We use the following terminology to define the spectral range divisions of MIRI:
ChannelThe spectral range covered by each MIRI IFU. The channels are labeled as 1, 2, 3 and 4.
Sub-ChannelThe 3 sub-ranges that a channel is divided into. These are designated as Short (A), Medium (B), and Long (C).
BandFor MIRI,
bandis one of the 12 contiguous wavelength intervals (four channels times three sub-channels each) into which the spectral range of the MRS is divided. Each band has a unique channel/sub-channel combination. For example, the shortest wavelength range on MIRI is covered by Band 1-SHORT (aka 1A) and the longest is covered by Band 4-LONG (aka 4C).For NIRSpec we define a band as a single grating-filter combination, e.g., G140M-F070LP. The possible grating/filter combinations for NIRSpec are given in the table below.
NIRSpec IFU Disperser and Filter Combinations
Grating |
Filter |
Wavelength (microns)* |
|---|---|---|
Prism |
Clear |
0.6 -5.3 |
G140M |
F070LP |
0.90 - 1.27 |
G140M |
F100LP |
0.97 - 1.89 |
G235M |
F170LP |
1.66 - 3.17 |
G395M |
F290LP |
2.87 - 5.27 |
G140H |
F070LP |
0.95 - 1.27 |
G140H |
F100LP |
0.97 - 1.89 |
G235H |
F170LP |
1.66 - 3.17 |
G395H |
F290LP |
2.87 - 5.27 |
* Approximate wavelength ranges are given to aid in explaining how to build NIRSpec IFU cubes, see NIRSpec Spectral configuration.
Types of Output Cubes
The output 3-D spectral data consist of rectangular cube with three orthogonal axes: two
spatial and one spectral. Depending on how cube_build is run the spectral axes can be either linear or non-linear.
Linear wavelength IFU cubes are constructed from a single band of data, while non-linear wavelength IFU cubes are
created from more than one band of data. If the IFU cubes have a non-linear wavelength dimension
there will be an added binary extension table to the output FITS file of the IFU cube. This extension has
the label WCS-TABLE and contains the wavelengths for each of the IFU cube wavelength planes. This table follows the
FITS standard described in Representations of spectral coordinates in FITS, Greisen, et al., 2006, A & A, 446, 747-771.
IFU Cube Geometry and Wavelength Sampling
The output 3-D spectral data consist of a rectangular cube with three orthogonal
axes: two spatial and one spectral. Depending on how cube_build is run,
the spectral axes can be either linear or non-linear.
Linear Wavelength Cubes: Generally constructed from a single band of data.
Non-Linear Wavelength Cubes: Usually created from more than one band of data.
The IFU cubes contain an extension labeled WCS-TABLE, which contains the wavelengths
for each of the IFU cube planes. This extension follows the FITS standard described in
Representations of spectral coordinates in FITS, Greisen, et al., 2006,
A & A, 446, 747-771. If the IFU cubes have a non-linear wavelength dimension, the CTYPE3 WCS parameter
is set to WAVE-TAB and the table is used to construct the FITS WCS. For linear wavelengths,
the CTYPE3 parameter is set to WAVE and the WCS is encoded via header keywords only.
Pipeline Input Handling and Default Behaviors
The input data to cube_build can take a variety of forms, as listed above in
Description. Because the MIRI IFUs project data from two
channels onto a single detector, choices must be made as to which parts
of the input data to use when constructing the output cube, even in the simplest
case of a single input image.
By default, cube_build creates cubes from a single band. For MIRI that means data from a
single channel and single sub-channel. For NIRSpec that means data from a single grating and filter.
This can be overridden
using the output_type=multi parameter. In the pipeline, this is controlled by
the parameter reference files for the pipeline that is being run.
The pars_spec2pipeline parameter reference file for MIRI sets output_type=multi.
In the case of the calwebb_spec2 pipeline, for example, where the input is a single MIRI or NIRSpec IFU exposure, the default output cube will be built from all the data in that single exposure.
MIRI: Uses data from both channels (e.g., 1A and 2A) that are recorded simultaneously in a single exposure. The output IFU cube will have a non-linear wavelength dimension.
NIRSpec: The data is from the single grating and filter combination contained in the exposure and will have a linear wavelength dimension.
In the calwebb_spec3 pipeline, on the other hand, where the input can be a collection of data from multiple exposures covering multiple bands, the default behavior is to create a set of separate band cubes.
NIRSpec: By default this pipeline generates multiple distinct cubes—one for each grating and filter combination contained in the input collection. These types of IFU cubes will have a linear wavelength dimension.
Custom Overrides: If the user wants to combine all the data together covering several bands, they can override this by using the option
output_type=multi. The resulting combined IFU cubes will have a non-linear wavelength dimension accompanied by theWCS-TABLEextension. In addition, if the user has a single grating and filter they can produce a non-linear wavelength dimension using thelinear_wave=Falseoption. This is particularly useful with Prism data.
In the calwebb_spec3 pipeline, on the other hand, where
the input can be a collection of data from multiple exposures covering multiple
bands, the default behavior is to create a set of single-band cubes with a linear-wavelength
dimension. If the user wants to combine all the data together covering several
band they can using the option output_type=multi and the resulting IFU cubes
will have a non-linear wavelength dimension.
Several cube_build step arguments are available to allow the user to control exactly what combinations of input
data are used to construct the output cubes. The IFU cubes are constructed, by default, on the sky with north pointing up
and east to the left. There are also options to change the output coordinate system, see the Step Arguments section for details.
Output Cube Format
The output spectral cubes are stored in FITS files that contain 4 IMAGE extensions. The primary data array is empty and the primary header holds the basic parameters of the observations that went into making the cube. The 4 IMAGE extensions have the following characteristics:
EXTNAME |
NAXIS |
Dimensions |
Data type |
|---|---|---|---|
SCI |
3 |
2 spatial and 1 spectral |
float |
ERR |
3 |
2 spatial and 1 spectral |
float |
DQ |
3 |
2 spatial and 1 spectral |
integer |
WMAP |
3 |
2 spatial and 1 spectral |
integer |
The SCI image contains the surface brightness of cube spaxels in units of MJy/sr. The wavelength dimension of the IFU cube can either be linear or non-linear. If the wavelength is non-linear, then the IFU cube contains data from more than one band. A table containing the wavelength of each plane is provided and conforms to the ‘WAVE_TAB’ FITS convention. The wavelengths in the table are read in from the CUBEPAR reference file. The ERR image contains the uncertainty on the SCI values, the DQ image contains the data quality flags for each spaxel, and the WMAP image contains the number of detector pixels contributing to a given voxel. The data quality flag does not propagate the DQ flags from previous steps but is defined in the cube build step as:
good data (value = 0),
non_science (value = 512),
do_not_use(value =1), or
a combination of non_science and do_not_use (value = 513).
The SCI and ERR cubes are populated with NaN values for voxels where there is no valid data (e.g., outside the IFU cube footprint or for saturated pixels for which no slope could be measured).
Output Product Name
If the input data is passed in as an ImageModel, then the IFU cube will be passed back as an IFUCubeModel. The cube
model will be written to disk at the end of processing. The file name of the output cube is based on a rootname plus
a string defining the type of IFU cube, along with the suffix ‘s3d.fits’. If the input data is a single exposure,
then the rootname is taken from the input filename. If the input is an association table, the rootname is defined in
the association table.
The string defining the type of IFU is created according to the following rules:
For MIRI, the output string name is determined from the channels and sub-channels used. The IFU string for MIRI is ‘ch’ plus the channel numbers used plus a string for the subchannel. For example, if the IFU cube contains channels 1 and 2 data for the short sub-channel, the output name would be
rootname_ch1-2_SHORT_s3d.fits. If all the sub-channels were used, then the output name would berootname_ch1-2_ALL_s3d.fits.For NIRSpec the output string is determined from the gratings and filters used. The gratings are grouped together in a dash (-) separated string and likewise for the filters. For example, if the IFU cube contains data from gratings G140M and G235M and from filters F070LP and F100LP, the output name would be
rootname_G140M-G235M_F070LP-F100LP_s3d.fits.
Calwebb_spec2 Pipeline
File names for cubes generated within the calwebb_spec2 pipeline follow standard pipeline formatting rules and append a simple, fixed suffix to the root name:
rootname_s3d.fits
Standalone or calwebb_spec3 Pipeline
When running cube_build as a standalone step or within the calwebb_spec3 pipeline, the output filename dynamically
includes details about the specific channels, bands, gratings, or filters used to construct the cube.
Root Name Selection: If the input data is a single exposure, the rootname is pulled directly from the input filename. If the input is
an association table, the rootname is explicitly defined by the association.
The instrument-specific naming rules are applied as follows:
MIRI Naming Rules The output string suffix is determined by the channels and sub-channels (bands) utilized. The formatting follows the pattern
_ch{#}-{band}, resulting in an output file namedrootname_ch{#}-{band}_s3d.fits.If the IFU cube combines multiple channels or bands, they are chained together. For example, a single cube constructed from Channel 1 and Channel 2, covering both short and medium sub-channels, will produce:
rootname_ch1-2-shortmedium_s3d.fits
NIRSpec Naming Rules The output string suffix is determined by the specific grating and filter combinations utilized. For standard single grating/filter cubes, the naming pattern is
rootname_{grating}-{filter}_s3d.fits.If the IFU cube is built from multiple bands, the elements are chained sequentially using hyphens to track each unique configuration pair. For example, if an IFU cube combines data from the G140M/F070LP and G235M/F100LP combinations, the output filename will be:
rootname_g140m-f070lp-g235m-f100lp_s3d.fits
Note
All instrument hardware strings (such as g140m or f070lp) are automatically normalized to lowercase characters when generating the final filename suffix.
Algorithm
Based on the pipeline settings and any user provided arguments defining the type of cubes to create, the program selects
the data from each exposure that should be included in the spectral cube. The output cube is defined using the WCS
information of all the input data. The input data are mapped to the output frame based on the WCS information that is
filled in by the assign_wcs step; this mapping includes any dither offsets.
Therefore, the default output cube WCS defines a field-of-view that encompasses the undistorted footprints on
the sky of all the input images.
The output sampling scale in all three dimensions for the cube
is defined by a CUBEPAR reference file as a function of wavelength, and can also be changed by the user.
The CUBEPAR reference file contains a predefined scale to use
for each dimension for each band. If the output IFU cube contains more than one band, then for MIRI, the
output scale corresponds to the channel with the smallest scale. In the case of NIRSpec, only gratings of the
same resolution are combined together in an IFU cube. The default output spatial coordinate system is right ascension-declination.
There is an option to create IFU cubes in the coordinate system of the NIRSpec or MIRI MIRS local IFU slicer plane (see
Step Arguments, coord_system='internal_cal').
The pixels on each exposure that are to be included in the output are mapped to the cube coordinate system. This pixel mapping is determined via a series of chained mapping transformations derived from the WCS of each input image and the WCS of output cube. The mapping process corrects for the optical distortions and uses the spacecraft telemetry information to map each pixel to its projected location in the cube coordinate system.
Weighting
The JWST pipeline includes two methods for building IFU data cubes:
3-D drizzling (default)
The core principle of both algorithms is to resample the 2-D detector data into a 3-D rectified data cube in a single step while conserving flux. The differences in the the techniques are how the detector pixels are weighted in the final 3-D data cube.
3-D drizzling
The default method of cube building uses a 3-D drizzling technique analogous to that used by 2-D imaging modes with an
additional spectral overlap computation. It is used when weighting=drizzle.
In the 3-D drizzling, we project the 2-D detector pixels to
their corresponding 3-D volume elements and allocate their intensities to the individual voxels of the final data cube according
to their volumetric overlap. The drizzling algorithm
computes the overlap between the irregular projected volumes of the detector pixels and the regular grid of cube voxels, which,
for simplicity, we assume corresponds to the world coordinates (R. A., decl., λ).
The detector pixels illuminated by JWST slicer-type IFUs contain a mixture of degenerate spatial and spectral information. The spatial extent in the along-slice direction (α) and the spectral extent in the dispersion direction (λ) both vary continuously within the dispersed image of a given slice in a manner akin to a traditional slit spectrograph and are sampled by the detector pixels (x, y). In contrast, the spatial extent in the across-slice direction (β) is set by the IFU image slicer width and changes discretely between slices. The four corners of a detector pixel thus define a tilted hexahedron in (α, λ) space with the front and back faces of the polyhedron defined by the lines of constant β created by the IFU slicer. (α, β) is itself rotated (and incorporates some degree of optical distortion) with respect to world coordinates (R.A., Decl.) and thus the volume element defined by a detector pixel is rotated in a complex manner with respect to the cube voxels, see Figure 1. The iso-α and iso-λ directions are not perfectly orthogonal to each other, and are similarly tilted with respect to the detector pixel grid. However, since iso-α is nearly aligned with the detector y-axis for MIRI (or x- axis for NIRSpec) and iso-λ is nearly aligned with the detector x-axis for MIRI (or y-axis for NIRSpec), we make the additional simplifying assumption to ignore this small tilt when computing the projected volume of the detector pixels. Effectively, this means that the surfaces of the volume element are flat in the α, β, and λ planes, and the spatial and spectral overlaps can be computed independently (see Figure 2).
With these simplifications, detector pixels project as rectilinear volumes into cube space. The detector pixel flux is redistributed onto a regular output grid according to the relative overlap between the detector pixels and cube voxels. The weighting applied to the detector pixel flux is the product of the fractional spatial and spectral overlap between detector pixels and cube voxels as a function of wavelength. The spatial extent of each detector pixel volume is determined from the combination of the along-slice pixel size and the IFU slice width, both of which will be rotated at some angle with respect to the output voxel grid of the final data cube. The spectral extent of each detector pixel volume is determined by the wavelength range across the pixel in the dimension most closely matched to the dispersion axis (i.e., neglecting small tilts of the dispersion direction with respect to the detector pixel grid). For more details on this method, see A 3D Drizzle Algorithm for JWST and Practical Application to the MIRI Medium Resolution Spectrometer, Law, D. R., et al. 2023, AJ, 166, 45.
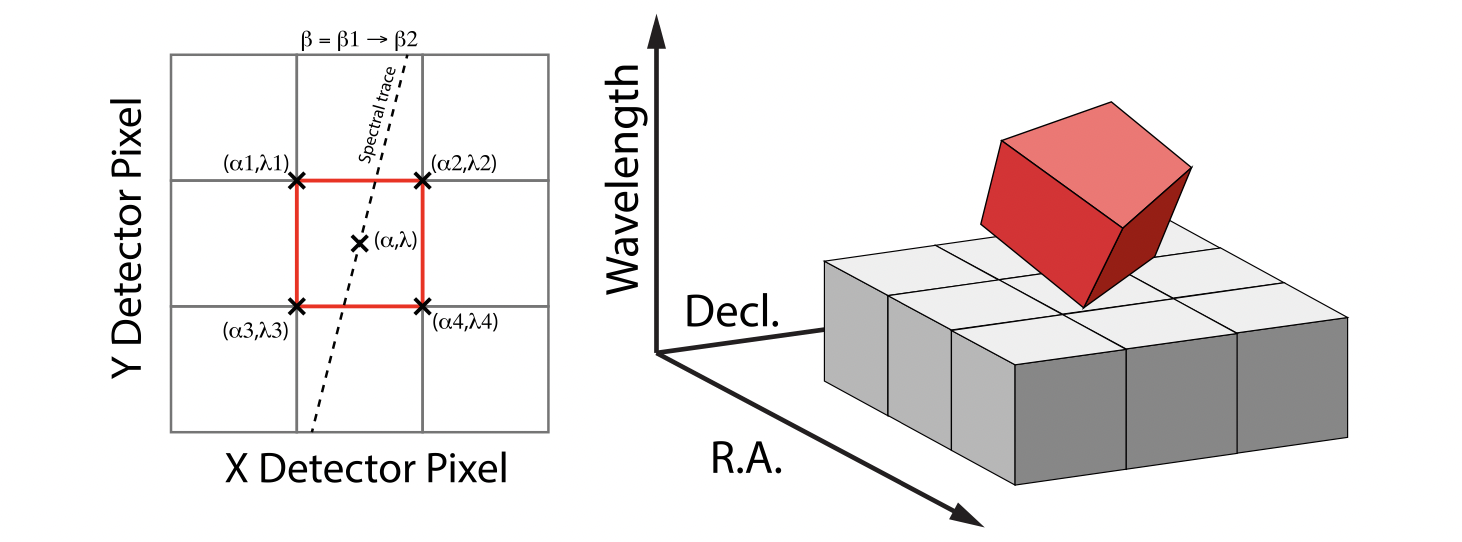
Figure 1: Left: general case detector diagram in which the dispersion axis is tilted with respect to the detector columns/rows, and the four corners of a given pixel (bold red outline) each have different wavelengths λ and along-slice coordinates α. Right: projection of this generalized detector pixel into the volumetric space of the final data cube. The red hexahedron represents the detector pixel, where the three dimensions are set by the along-slice, across-slice, and wavelength coordinates. The regular gray hexahedra represent voxels in a single wavelength plane of the data cube. For clarity, the cube voxels are shown aligned with the (R.A., Decl.) celestial coordinate frame, but this choice is arbitrary.
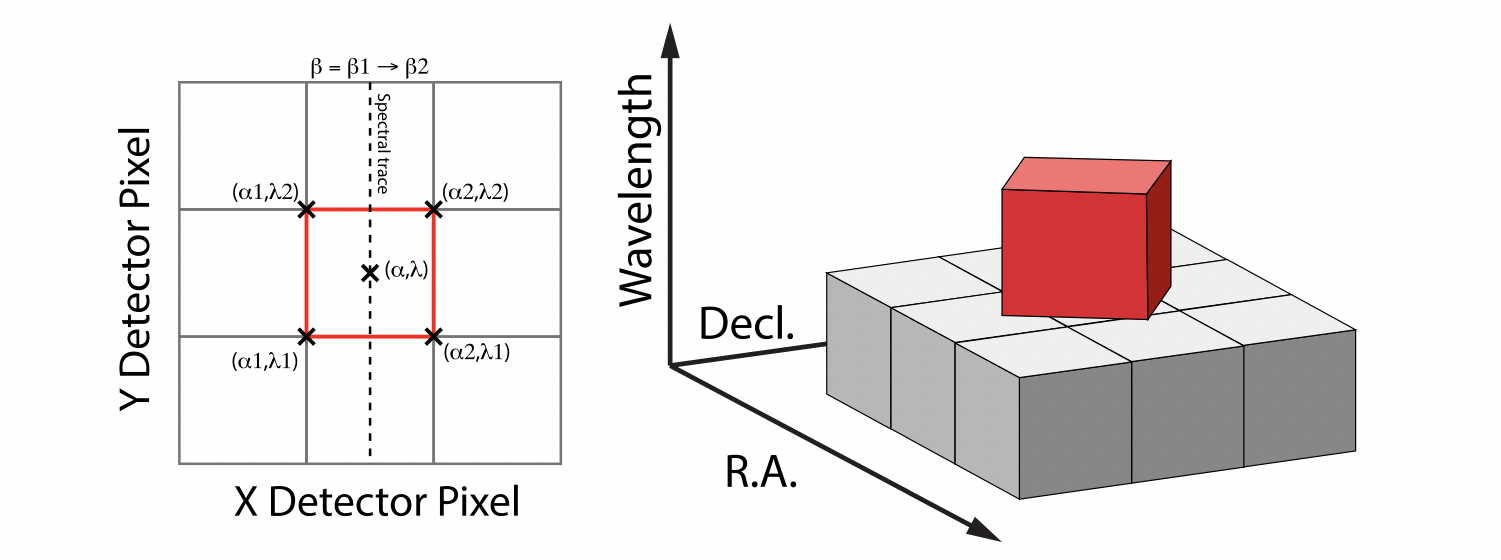
Figure 2: Same as Figure 1 but representing the simplified case in which the spectral dispersion is assumed to be aligned with detector columns and the spatial distortion constant for all wavelengths covered by a given pixel. This assumption reduces the computation of volumetric overlap between red and gray hexahedra to separable 1D and 2D computations.
Shepard’s method of weighting
The second approach to cube building is to use a flux-conserving variant of Shepard’s method, which is an alternative based on an exponential modified-Shepard method (EMSM) weighting function. In this technique we ignore the overlap between the detector pixel and cube voxel and instead treat each pixel as a single point when mapping the detector to the sky. The mapping process results in an irregularly spaced “cloud of points” that sample the specific intensity distribution at a series of locations on the sky. A schematic of this process is shown in Figure 3.
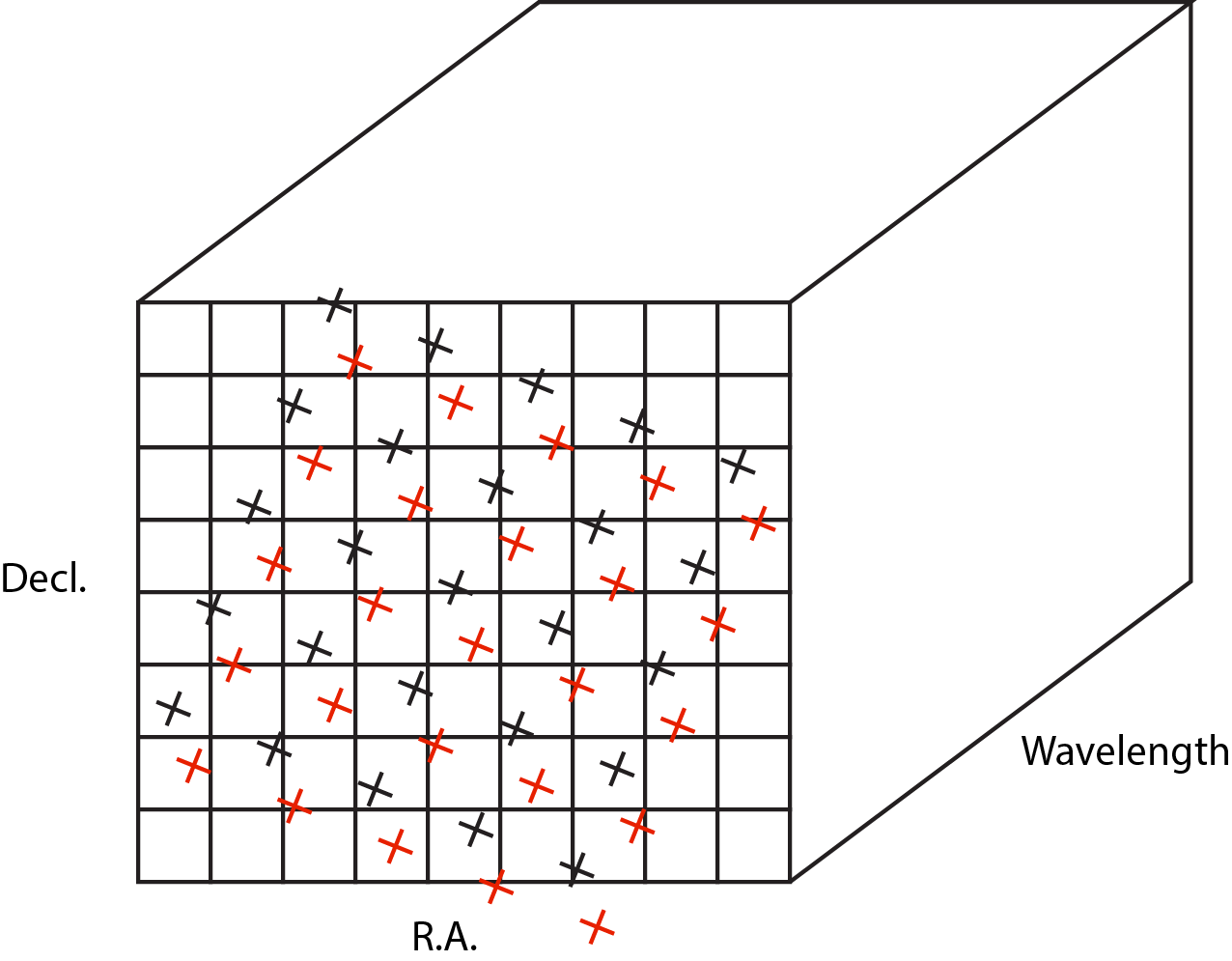
Figure 3: Schematic of two dithered exposures mapped to the IFU output coordinate system (black regular grid). The plus symbols represent the point cloud mapping of detector pixels to effective sampling locations relative to the output coordinate system at a given wavelength. The black points are from exposure one and the red points are from exposure two.
Each point in the cloud represents a measurement of the specific intensity (with corresponding uncertainty) of the astronomical scene at a particular location. The final data cube is constructed by combining each of the irregularly-distributed samples of the scene into a regularly-sampled voxel grid in three dimensions for which each spaxel (i.e., a spatial pixel in the cube) has a spectrum composed of many spectral elements. The final value of value of a given voxel of the cube is a distance-weighted average of all point-cloud members within a given region of influence.
In order to explain this method we introduce the follow definitions:
- xdistance
Distance between point in the cloud and voxel center in units of arc seconds along the x axis.
- ydistance
Distance between point in the cloud and voxel center in units of arc seconds along the y axis.
- zdistance
Distance between point in the cloud and voxel center in the lambda dimension in units of microns along the wavelength axis.
These distances are then normalized by the IFU cube voxel size for the appropriate axis:
- xnormalized
xdistance/ (cube voxel size in x dimension [cdelt1])- ynormalized
ydistance/ (cube voxel size in y dimension [cdelt2])- znormalized
zdistance/ (cube voxel size in z dimension [cdelt3])
The final voxel value at a given wavelength is determined as the weighted sum of the point cloud members with a spatial and
spectral region of influence centered on the voxel.
The default size of the region of influence is defined in the CUBEPAR reference file, but can be changed by the
user with the options: rois and roiw.
If n point cloud members are located within the ROI of a voxel, the voxel flux:
\(K = \frac{ \sum_{i=1}^n Flux_i w_i}{\sum_{i=1}^n w_i}\)
where the weighting weighting=emsm is:
\(w_i = e^{\frac{ -({xnormalized}_i^2 + {ynormalized}_i^2 + {znormalized}_i^2)} {scale\_factor}}\)
and:
\(scale\_factor = scale\_rad / cdelt1\)
where scale_rad is read in from the reference file and varies with wavelength.
If the alternative weighting function (set by weighting=msm) is selected then:
\(w_i = (\sqrt{({xnormalized}_i^2 + {ynormalized}_i^2 + {znormalized}_i^2)^{p} })^{-1}\)
In this weighting function, the default value for p is read in from the CUBEPAR reference file. It can also be set
by the argument weight_power=value.